
Схема драйвер светодиода: Схемы драйверов светодиодов на PT4115, QX5241 и др. микросхемах с регулятором яркости для диммируемых светодиодных светильников
Схема драйвера для светодиодов лампы JCDR-G5.3 на 220 вольт мощностью 7W
схемы, конструкции, статьи
Схема драйвера для светодиодов лампы JCDR-G5.3 на 220 вольт мощностью 7W выполнена на микросхеме BP3122.
Драйвер питания светодиодов обеспечивает высокую точность поддержания выходного тока в диапазоне входных напряжений 70 – 260 вольт переменного и постоянного тока и имеет защиты от короткого замыкания, обрыва LED, перегрева и другие.
Электрическая принципиальная схема драйвера лампы JCDR-G5.3
Производитель рекомендует не превышать выходную мощность драйвера более 5 Вт. В BP3122 интегрированы выходные полевые транзисторы MOSFET с допустимым напряжением 650 вольт, нагрузкой которых является первичная обмотка трансформатора.
Мизерный ток потребления микросхемы позволяет исключить дополнительную обмотку на трансформаторе, а запатентованная архитектура чипа требует минимального количества внешних элементов.
Тридцать светодиодов установлены на плате из фольгированного стеклотекстолита и составляют 10 параллельно включенных цепочек, каждая из трех светодиодов соединенных последовательно. Все детали кроме трансформатора и электролитического конденсатора С4 — smd. Специальные выступы печатной платы драйвера (выходное напряжение) впаяны в прорези на плате со светодиодами.
Внимание! Соблюдайте правила электробезопасности. Электротравмы, могут быть смертельными, а неправильный ремонт пожароопасным.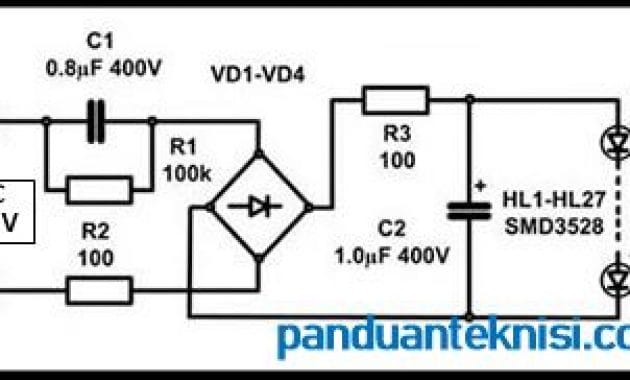
Параметры драйвера:
Напряжение на светодиодах 9,8 вольта, ток 260 мА, частота 62 кГц во всем диапазоне входных напряжений сети.
КПД в диапазоне входных напряжений 120 – 250 вольт переменного тока находится в пределах 80 – 82%. При снижении напряжения от 110 до 60 вольт КПД снижается от 78 до 62 процентов.
При изменении напряжения сети от 180 до 250 вольт потребляемый матрицей светодиодов ток плавно падает с 260 до 200 мА.
К такому импульсному драйверу можно подключать три включенных последовательно мощных светодиода по 1 Вт каждый. Откуда производитель взял мощность лампы 7 Ватт непонятно, т.к. с учетом КПД потребляемая мощность составляет порядка трех ватт. Видимо просто маркетинговый ход, либо установлены супер яркие экономичные светодиоды у которых световое излучение более чем в два раза сильнее, чем у стандартных. Визуально световой поток лампы сравним с лампой GL5.5
Лучшие схемы
- Светодиодная лампа smartbuy с драйвером на SM2082D
- Лампа народная на bp9916c
- Разрядное устройство
- Схема диодной лампы 5 Вт 220в
- Схема драйвера светодиодов на 220
- LED лампа Selecta g9 220v 5w
- Простое зарядное устройство
- Схема светодиодной лампы на 220в
- Светодиодная лампа ASD LED-A60
- Лампа ЭРА А65 13Вт
- Схема светодиодной ленты
- Простой цифровой термометр
- Лампа Фотон 15 Вт
- LED лампа Estares GL10-E27
- Драйвер Dark Energy
Статьи
- Светодиодные филаментные лампы
- Напряжение на светодиоде
- Общедомовой учет тепла
- Линейные светодиодные светильники
- Светодиодные ленты LED
- Как паять светодиодную ленту
- Лампа своими руками
- Глушилки сотовых телефонов
- Освещение для дома
- Светодиодная лента на 220 в
- Подсветка для кухни из ленты
- Подсветка рабочей зоны кухни
Светодиодная лампа ASD LED-A60
Лампа ЭРА А65 220В 13Вт
Схема и устройство светодиодной лампы на 220 вольт
Светодиодная лампа g9 220v, схема и параметры
Светодиодные ленты LED
Светодиодная лента на 220 вольт
Лампа своими руками
Подсветка для кухни своими руками
Подсветка рабочей зоны кухни
Разрядное устройство для аккумулятора
Повышаем КПД двухкаскадных светодиодных драйверов
Повышаем КПД двухкаскадных светодиодных драйверов
Вейрих (Dr. Weirich), Infineon Technologies
Weirich), Infineon Technologies
В данной статье описывается простой способ повышения КПД драйверов, используемых для управления светодиодами в широком диапазоне мощностей. Предлагаемый метод не требует серьезных затрат и в то же время позволяет снизить номинал индуктивностей в выходном каскаде драйвера, что приводит к уменьшению стоимости и позволяет уменьшить габариты устройства. Рис.1
Рисунок 1. Основные конфигурации двухкаскадных светодиодных драйверов
Драйверы светодиодов, построенные на базе двухкаскадной топологии, завоевали популярность благодаря широкому диапазону входных мощностей, возможности точной регулировки яркости светодиодов (диммирование) и стабильному сигналу на выходе. Когда речь идет о выходной мощности до 50 Вт, комбинация из обратноходового преобразователя с корректором коэффициента мощности (ККМ) и понижающего преобразователя в качестве выходного каскада является наиболее оптимальной. Использование двухкаскадной топологии значительно расширяет возможности оптимизации и проектирования приложений по сравнению с однокаскадными драйверами. Однако использование двухкаскадной топологии значительно усложняет увеличение КПД таких драйверов традиционными способами. Представленный в статье метод описывает как можно увеличить КПД драйвера без особых затрат и существенных изменений в схеме. Кроме того, применение данного метода позволит использовать индуктивности меньшего номинала на стороне понижающего преобразователя, что приведет к снижению габаритов всего устройства.
Однако использование двухкаскадной топологии значительно усложняет увеличение КПД таких драйверов традиционными способами. Представленный в статье метод описывает как можно увеличить КПД драйвера без особых затрат и существенных изменений в схеме. Кроме того, применение данного метода позволит использовать индуктивности меньшего номинала на стороне понижающего преобразователя, что приведет к снижению габаритов всего устройства.
Светодиодные драйверы и качество света LED
Качество света довольно растяжимое понятие и в первую очередь означает отсутствие каких-либо световых артефактов, например, мерцания или эффектов стробоскопа. Данные эффекты связаны в первую очередь с модуляцией тока в светодиодах и должны быть сведены к минимуму. Одной из первостепенных задач разработчика во время проектирования схемы драйвера является обеспечение постоянного тока на выходе, который бы не был подвержен каким-либо изменениям вне зависимости от режима или условий работы. Любое отклонение тока на выходе драйвера от постоянного значения будет влиять на работу светодиода, а значит и на качество испускаемого им света. На данный момент не существует каких-либо общепринятых стандартов, регулирующих уровень световых артефактов, однако максимально допустимые уровни модуляции тока в LED, обозначенные в IEE1789-2015, являются разумным ориентиром при проектировании схем драйверов. [1]
Любое отклонение тока на выходе драйвера от постоянного значения будет влиять на работу светодиода, а значит и на качество испускаемого им света. На данный момент не существует каких-либо общепринятых стандартов, регулирующих уровень световых артефактов, однако максимально допустимые уровни модуляции тока в LED, обозначенные в IEE1789-2015, являются разумным ориентиром при проектировании схем драйверов. [1]
Другим важным аспектом, влияющим на качество света LED, является точность регулировки яркости светодиода и ее минимально возможное значение. Соответствие минимальной границы диммирования между различными драйверами представляет собой один из важнейших параметров при выборе компонентов. Регулировка яркости производится либо посредством ШИМ-модуляции, либо путем перехода в прерывистый режим работы выходного каскада драйвера. И то и другое неизбежно вызывает некоторую модуляцию тока и может повлиять на качество света, испускаемого светодиодом.
Что касается входа драйвера, то тут также присутствуют некоторые нюансы, которые необходимо учитывать при разработке схемы. Международные стандарты, такие как IEC 61000-3-2: 2014 [5], требуют от драйверов высокого коэффициента мощности (PF) и низкого содержания гармоник (THD) входного тока. По сути данные требования означают, что входной ток должен совпадать по фазе и форме волны с напряжением. Переиздание стандарта IEC 61000-3-2: 2018 [6] расширило его сферу влияния на драйверы с номинальной входной мощностью выше 5 Вт, а также более подробно, чем раньше, описало требования для диммируемых драйверов. Как итог, можно сказать, что, требования, касающийся мощности на входах драйверов светодиодов приобретают все более жесткий формат и их становится все сложнее удовлетворить при помощи стандартных преобразователей.
Международные стандарты, такие как IEC 61000-3-2: 2014 [5], требуют от драйверов высокого коэффициента мощности (PF) и низкого содержания гармоник (THD) входного тока. По сути данные требования означают, что входной ток должен совпадать по фазе и форме волны с напряжением. Переиздание стандарта IEC 61000-3-2: 2018 [6] расширило его сферу влияния на драйверы с номинальной входной мощностью выше 5 Вт, а также более подробно, чем раньше, описало требования для диммируемых драйверов. Как итог, можно сказать, что, требования, касающийся мощности на входах драйверов светодиодов приобретают все более жесткий формат и их становится все сложнее удовлетворить при помощи стандартных преобразователей.
Результатом ужесточения требований становится то, что однокаскадные драйверы становятся все менее популярны и все чаще заменяются двухкаскадными решениями, которые значительно упрощают процесс оптимизации схемы для получения стабильного тока и напряжения в широком диапазоне выходных мощностей. Ток и напряжение с входного каскада драйвера подается на выходной каскад, где дополнительно оптимизируется для последующей подачи на светодиоды.
Существует две основные конфигурации двухкаскадных драйверов (рисунок 1): с гальванической развязкой, расположенной после входного каскада и развязкой, расположенной после выходного каскада. Очевидно, что вторая конфигурация плохо подходит для приложений, в которых требуется наличие более одного канала на выходе схемы, таких, например, как решения для управления RGB-светодиодами. Данная конфигурация также будет иметь недостатки при использовании в одноканальных решениях, в которых интерфейс регулировки яркости не изолирован дополнительно от шины питания. Приведенные выше недостатки не зависят от того будет ли применяться регулировка по первичной (PSR) или вторичной стороне (SSR).
Следствием приведенных выше тезисов является то, что двухкаскадные драйверы светодиодов на основе изолированного ККМ за которым следует понижающий каскад, являются наиболее универсальным решением для приложений с выходной мощностью до 50 Вт, а возможно даже несколько выше. Это в свою очередь объясняет почему данная топология стала чрезвычайно популярной при построении драйверов светодиодов от которых требуется обеспечение высокого качества выходного сигнала.
КПД двухкаскадных драйверов
Несмотря на все плюсы, применение описанной выше двухкаскадной конфигурации может породить ряд проблем, связанных с уровнем КПД схемы, повышение которого является весьма непростой задачей. Так, например, при уровне КПД 92% во входном каскаде (что является отличным показателем для обратноходовых преобразователей) и 97% в выходном преобразователе, общая эффективность схемы будет немного выше 89%. Если учесть требования директивы ЕС, касающейся систем освещения (European Single Lighting Regulation, SLR), согласно которой уровень КПД для драйверов мощностью 50 Вт должен быть не менее 85%, то предлагаемая система будет иметь даже некоторый запас. Тем не менее многие производители драйверов считают высокий КПД важным параметром схемы, особенно когда дело касается определения рабочих температур конечного приложения и проектирования систем охлаждения. Более общепринятым требованием среди производителей драйверов является поддержание уровня КПД выше 88% во всем диапазоне выходных мощностей.
Существует множество способов повысить КПД в обеих частях схемы, однако все они значительно увеличивают ее сложность и стоимость. Выходом является использование понижающего преобразователя с гистерезисным управлением (hysteretic buck), такого как Infineon ILD6150 или ILD8150 в сочетании с обратноходовым преобразователем с регулировкой по вторичной стороне, таким как XDPL8218, а также внесение небольших изменений в контур обратной связи. Благодаря этим изменениям выходное напряжение обратноходового преобразователя становится регулируемым и дает возможность сохранять разность напряжений на входе и выходе понижающего преобразователя на постоянном уровне.
Увеличиваем КПД преобразователя с гистерезисным управлением
Понижающий преобразователь с гистерезисным управлением является почти идеальным решением для выходного каскада светодиодного драйвера. Более подробное описание hysteretic buck приведено в документации к микросхеме ILD8150 [2]. Рис. 2
Рисунок 2. Схема включения понижающего преобразователя с гистерезисным управлением ILD8150
Схема включения понижающего преобразователя с гистерезисным управлением ILD8150
Hysteretic buck идеально подходит для обеспечения постоянного тока на выходе схемы поскольку для его стабилизации не требуется контур обратной связи. Отсутствие контура обратной связи означает, что также не потребуется и его компенсация, следствием чего является существенное снижение количества дискретных компонентов, необходимых для построения схемы (рисунок 2), особенно при условии интегрированного MOSFET.
Принцип повышения КПД за счет использования hysteretic buck основан на том, что последний работает с переменной частотой коммутации fS. Данная частота определяется величиной индуктивности L, амплитудой пульсаций тока Di, а также входным и выходным напряжениями VIN и VOUT.
В чем же такая важность частоты коммутации? Как видно из [2] и [3], общие потери проводимости, состоящие из потерь проводимости MOSFET и встроенного диода, определяются их сопротивлениями и током светодиода. С другой стороны, потери на переключение сильно зависят от VIN, а также от fS.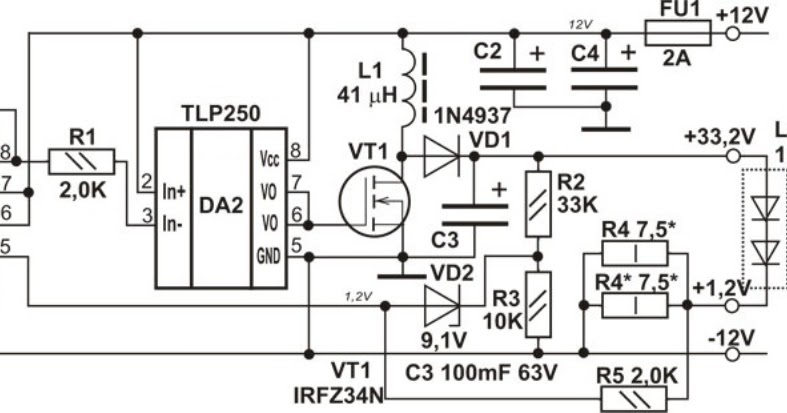
Анализ документации ILD8150 [2] показывает, что разница между входным и выходным напряжением (VIN-VOUT) является основополагающим фактором при определении частоты коммутации fS и что ее вариативность снижается при сохранении постоянного значения разности VIN-VOUT (рисунок 3).
При фиксированном VIN (синяя кривая на графике рисунка 3) и падении напряжении на LED, частота коммутации возрастает более чем в 2 раза при падении выходного напряжения на 1/3. Следствием такого падения станет увеличение не только коммутационных потерь понижающего преобразователя почти втрое, но и увеличение потерь в индуктивности. Вариантом снижения потерь при фиксированном VIN является подбор значения индуктивности, которое должно быть достаточно малым, чтобы поддерживать частоту коммутации выше слышимого диапазона во всех режимах работы, но в то же время не должно допускать слишком высокого значения fS для ограничения потерь в схеме. Кроме того, следует учитывать, что значение частоты коммутации fS выше 150 кГц может дополнительно вызвать проблемы с кондуктивными электромагнитными помехами.
В тех случаях, когда значение разности VIN-VOUT остается постоянной (желтая кривая на графике рисунка 3), поведение fS полностью изменяется. fS приобретает линейную зависимость от напряжения светодиода и незначительно снижается при его уменьшении. Это в свою очередь означает, что индуктивность схемы может быть значительно уменьшена, например, вдвое, при сохранении относительно низкой частоты переключения в большей части рабочего диапазона выходных напряжений. Если размер катушки индуктивности при этом остается неизменным, снижение номинала будет означать меньшее количество витков и снижение потерь. Однако еще более привлекательным вариантом для разработчика является использование катушки индуктивности меньшего размера и стоимости. Красная кривая на рисунке 3 показывает зависимость частоты коммутации fS от выходного напряжения драйвера при индуктивности, номинал которой был снижен в 2,5 раза по сравнению с двумя другими случаями (340 мкГн против 860 мкГн). При таком снижении индуктивности, частота коммутации по-прежнему остается в пределах 85 кГц, что означает минимальный риск возникновения электромагнитных помех. Таким образом, при использовании понижающего преобразователя с гистерезисным управлением в выходном каскаде драйвера мы получим не только увеличение КПД схемы за счет вариативности частоты переключения, но и уменьшение ее габаритов и стоимости за счет отсутствия контура обратной связи и возможности уменьшения индуктивности. Рис.3
Таким образом, при использовании понижающего преобразователя с гистерезисным управлением в выходном каскаде драйвера мы получим не только увеличение КПД схемы за счет вариативности частоты переключения, но и уменьшение ее габаритов и стоимости за счет отсутствия контура обратной связи и возможности уменьшения индуктивности. Рис.3
Рисунок 3. График зависимости частоты коммутации fS от выходного напряжения hysteretic buck при фиксированном VIN (синяя кривая), фиксированной разности VIN-VOUT (желтая кривая) и фиксированной разности VIN-VOUT при снижении индуктивности в 2,5 раза (красная кривая)
Реализация предлагаемой конфигурации
Предлагаемую конфигурацию на удивление просто реализовать на практике. Все, что требуется – это вместо стабилизации выходного напряжения обратноходового преобразователя при помощи источника опорного напряжения (как показано на рисунке 4а), регулировать разницу входного и выходного напряжений понижающего преобразователя так, чтобы она приобретала постоянное значение, например, 5 В (рисунок 4б). Создание цепи, обратной связи, с помощью которой будет осуществляться регулирование почти не требует включения в схему дополнительных компонентов, за исключением нескольких недорогих резисторов. Рис.4
Создание цепи, обратной связи, с помощью которой будет осуществляться регулирование почти не требует включения в схему дополнительных компонентов, за исключением нескольких недорогих резисторов. Рис.4
Рисунок 4. Стандартная схема стабилизации выходного напряжения обратноходового преобразователя (а) и предлагаемое решение (б)
Для того, чтобы удостовериться, что при использовании предлагаемой конфигурации не возникнет каких-либо проблем, был проведен обширный теоретический анализ [4]. Частью анализа было определение передаточных функций для обратноходового преобразователя с ККМ и понижающего преобразователя с гистерезисным управлением, а также анализ устойчивости контура обратной связи с использованием MATLAB / SIMULINK. Как и ожидалось, проведенный анализ не выявил каких-либо проблем, связанных со стабильностью работы схемы, кроме тех, которые уже были известны в старой конфигурации. Контур обратной связи должен иметь низкое быстродействие, а его полоса пропускания должна быть ниже 20 Гц, как и в случае с любым другим обратноходовым преобразователем с ККМ. Стоит отметить, что проведенный анализ также не выявил какого-либо отрицательного воздействия на производительность понижающего преобразователя ни с точки зрения подавления пульсаций на выходе, ни с точки зрения реакции на нагрузку.
Стоит отметить, что проведенный анализ также не выявил какого-либо отрицательного воздействия на производительность понижающего преобразователя ни с точки зрения подавления пульсаций на выходе, ни с точки зрения реакции на нагрузку.
Остается вопрос, насколько малым может быть значение разности VIN-VOUT? Данное значение определяется коэффициентом заполнения понижающего преобразователя.
При работе преобразователя в режиме непрерывной проводимости (CCM), его коэффициент заполнения d определяется как:
d = VOUT / VIN
Таким образом максимальное значение коэффициента заполнения (dMax) будет при
VIN = VOUT, Max/ dMax
В конечном итоге это приведет к уравнению:
VIN-VOUT ≥ VOUT, Max (1/dMax-1)
ILD8150 имеет dMax = 0,97. Таким образом, если выбранное максимальное выходного напряжение составляет, например, 60 В, минимальное значение равности VIN-VOUT будет составлять всего 2 В, что позволяет использовать индуктивности с очень низкими номиналами.
Результаты использования обновленной конфигурации
Ожидаемый рост КПД за счет применения предлагаемой конфигурации был подтвержден в схеме двухкаскадного драйвера на основе AC-DC преобразователя XDPL8218 и следующего за ним понижающего преобразователя с гистерезисным управлением ILD8150. Подробное описание предлагаемой конфигурации приведено в документации к ILD8150 [2].
Подробное описание предлагаемой конфигурации приведено в документации к ILD8150 [2].
Первые тесты обновленной схемы (изменена только структура цепи обратной связи) показали рост КПД на 1.3% при максимальном выходном напряжении (16 светодиодов ≈ 48 В) и более 3% при более низких выходных напряжениях (11 светодиодов. ≈ 33 В). Графики зависимости КПД от выходного напряжения (количества подключенных светодиодов) приведены на рисунке 5. Рис.5
Рисунок 5. График зависимости КПД схемы от выходного напряжения при применении обновленной конфигурации
Более впечатляющими являются результаты, показанные на рисунке 6. В данном случае была заменена индуктивность понижающего преобразователя: вместо громоздкого навесного компонента номиналом 860 мкГн был использовано SMD-компонент с номиналом 100 мкГн. Новый компонент имеет куда меньшие габариты (объем 1,4 см3 против 6,4 см3) и вес (7 г против 32 г). Несмотря на значительно снижение номинала индуктивности, КПД схемы остается практически на том же уровне. Рис.6
Рис.6
Рисунок 6. Сравнение графиков зависимостей КПД от выходного напряжения при использовании индуктивности номиналом 860 мкГн (красная кривая на графике) и 100 мкГн (зеленая кривая)
Применение обновленной конфигурации схемы позволяет достигнуть впечатляющих результатов, заключающихся не только в повышение эффективности драйверов, но и в снижении их габаритов, веса и стоимости.
Литература
[1] IEEE Recommended Practices for Modulating Current in High-Brightness LEDs for Mitigating Health Risks to Viewers, IEEE Standard 1789-2015,Jun. 2015.
[2] ILD8150 80 V high side buck LED driver IC with hybrid dimming
[3] ILD8150 high-frequency operation
[4] Thomas Altmann, Efficiency Optimization, Size and Cost Reduction of a LED Driver, Master Thesis, Technische Universität München, 2019
[5] IEC 61000-3-2:2014 Electromagnetic compatibility (EMC) – Part 3-2: Limits – Limits for harmonic current emissions (equipment input current ≤ 16 A per phase), 4th edition, 2014
[6] IEC 61000-3-2:2018 Electromagnetic compatibility (EMC) — Part 3-2: Limits – Limits for harmonic current emissions (equipment input current ≤16 A per phase), 5th edition, 2018
Полный текст в журнале Современная Светотехника № 1/2021г.
Работа и применение
Схема драйвера светодиода
Светодиод, т. е. светоизлучающий диод, представляет собой особый вид диода, который излучает энергию в видимом диапазоне электромагнитного спектра. Однако при прямом смещении он проводит так же, как и диод с p-n переходом. Он используется в качестве оптоэлектронного устройства.
Теперь позвольте задать вам простой вопрос. В нашем доме мы получаем 230 вольт переменного тока, можем ли мы подать это напрямую на светодиод? Ответ должен быть конечно нет. Это связано с тем, что светодиоду требуется постоянный входной ток. Таким образом, чтобы служить этой цели, нам нужна схема драйвера.
В этой конкретной статье мы узнаем о конструкции схемы драйвера светодиодов на 230 вольт. Как правило, широко используется подход с использованием трансформатора для питания от переменного тока к постоянному. Но только подумайте, будет ли это хорошим вариантом для управления такой нагрузкой, как светодиод? Нисколько. Так что давайте попробуем по-другому.
Так что давайте попробуем по-другому.
Принцип схемы драйвера светодиода
Я надеюсь, что после вышеизложенного вы поняли цель статьи. Да, мы должны разработать бестрансформаторный Схема драйвера светодиода (можно использовать, в частности, дома.)
Схема драйвера содержит конденсаторы переменного тока, которые рассчитаны на высокое напряжение и подключены между линиями. Основная функция конденсатора заключается в ограничении тока питания. Поскольку конденсатор только уменьшает ток, высокое напряжение исчезает (выпрямление и регулирование) в более поздней части цепи.
Схема драйвера светодиода мощностью 5 ВтКомпоненты схемы драйвера светодиода
- Электролитический конденсатор (неполяризованный 2,2 мкФ)
- Четыре резистора (1 кОм, 10 кОм, 22 кОм, 390 кОм)
- Мостовой выпрямитель
- Стабилитрон (4,7 В)
- Светодиод (ярко-белый)
- А, поляризованный конденсатор (47 мкФ) 2 9 Схема драйвера светодиода Исполнение
- К сети питания подключен конденсатор переменного тока в линию с сетью питания.

- Затем параллельно этому конденсатору подключается резистор номиналом 390 кОм. Это разрядка конденсатора при отсутствии питания. Между источником питания и выпрямителем подключается еще один резистор 10 Ом, который здесь можно назвать предохранителем.
- Чтобы преобразовать входящее переменное напряжение в постоянное, мы используем двухполупериодный мостовой выпрямитель. Его мощность составляет 1,5А по току.
- Теперь выходной сигнал мостового выпрямителя фильтруется с помощью конденсатора (фильтр C) емкостью 4,7 мкФ.
- Зенеровский диод используется для регулирования выходного сигнала двухполупериодного мостового выпрямителя. Учитывая ток, который идет на стабилитрон, мы последовательно подключили резистор номиналом 22 кОм. Значение напряжения стабилитрона составляет 4,7 вольта.
- Выход стабилитрона еще раз фильтруется конденсатором 47 мкФ и, наконец, подается на светодиод (нагрузка). 9(-6))
имеем C = 2,2 мкФ
= 1447,59
Следовательно, по закону Ома ток конденсатора I = V/R
, полагая значения V и Xc , I = 158 мА
Теперь, этот ток поступает в выпрямитель.
 Кроме того, на вход мостовой схемы подается 230 В СКЗ. Таким образом, Vmax = 230 * √ 2 = 325,26 В. Таким образом, конденсаторный фильтр должен быть рассчитан на 400 В. После выпрямителя напряжение будет около 305 В, которое в дальнейшем необходимо снизить, чтобы использовать его в качестве входа светодиода.
Кроме того, на вход мостовой схемы подается 230 В СКЗ. Таким образом, Vmax = 230 * √ 2 = 325,26 В. Таким образом, конденсаторный фильтр должен быть рассчитан на 400 В. После выпрямителя напряжение будет около 305 В, которое в дальнейшем необходимо снизить, чтобы использовать его в качестве входа светодиода.Зенеровский диод служит этой цели. Кроме того, следует помнить о его номинальной мощности, а также о последовательном резисторе и его номинальной мощности. Сначала рассчитаем подходящее значение последовательного сопротивления.
R
s = (V в – V z )/( I L + I z ), где Iz = 10 мА, IL = 5 В 0,04 мА 90,03 = 4,7 В
Следовательно, Rs = 20020 кОм
Теперь необходимо рассчитать номинальную мощность этого резистора, так как он определяет мощность, которую он может рассеивать.
Ps = (V
в – V z ) 2 /R sподставив все значения, получим
92/Rs = 0,07 ВтТаким образом, выпрямленное регулируемое напряжение вместе с ограниченным током подается на светодиодную нагрузку.

Также смотрите Полупериодный выпрямитель
Преимущества схемы драйвера
- Она проста и экономична, так как бестрансформаторная.
- Маленький размер и очень большой вес.
Ограничения схемы драйвера светодиодов
- Применение здесь лучше всего подходит для бытового использования и однофазного питания.
- Используемый здесь конденсатор может вызывать всплески при колебаниях сети.
Применение схемы драйвера светодиодов
- Используется для освещения и декоративных целей дома.
- Он также используется в автомобилях, велосипедах и других автомобилях в качестве индикатора.
- Эта схема также используется в комбинации с дверным звонком для обеспечения индикации.
- Он используется в различных бытовых целях, таких как коммерческое и жилое освещение.
Надеюсь, вы получили некоторые идеи о разработке схемы драйвера. Я хотел бы видеть любые новые творческие идеи в разделе комментариев ниже.
 Кроме того, оставьте свой отзыв о статье (дизайне) выше, чтобы мы могли продолжать улучшать качество для вас.
Кроме того, оставьте свой отзыв о статье (дизайне) выше, чтобы мы могли продолжать улучшать качество для вас.Также смотрите подробное объяснение цепи зарядного устройства солнечной батареи
Схемы драйверов светодиодов — конструкция электрического пожаротушения
В этой статье описываются аппаратные схемы как часть системы управления освещением на основе микроконтроллера, которые можно использовать для надежного и эффективного управления различные типы светодиодов, описанные в части 1.
- Squared , Charles Gadeken
- Iceberg , ATOMIC3
Введение
текущий режим, а затем исследует варианты управления затемнением для каждого цвета с помощью широтно-импульсной модуляции (ШИМ). Далее следует обсуждение методов управления как аналоговыми, так и цифровыми/адресными светодиодными лентами, касающимися как цветовых данных/сигналов управления, так и проблем распределения питания на длинные участки светодиодной ленты.
Драйверы постоянного напряжения
Неопределенность Vf при заданном IfЯркость (световой поток) светодиода зависит главным образом от величины тока, протекающего через устройство в прямом направлении, обозначаемого как I f . Производители светодиодов предоставляют спецификацию для «типичного» значения I f , при котором светодиод рассчитан на непрерывную работу. Прямое падение напряжения (V f ) на устройстве при работе с номинальным значением I f может значительно варьироваться в зависимости от температуры и производственных различий между партиями. Как показано на примере диаграммы справа, I f резко возрастает при увеличении V f , но существует некоторая неопределенность в отношении точной корреляции между Vf и I f без более подробного анализа конкретного светодиода и условий эксплуатации, таких как температура окружающей среды.
Почему это важно? Потому что заманчиво управлять светодиодами с помощью очень простой схемы, в которой используется источник питания с фиксированным (постоянным) напряжением, и который только косвенно контролирует ток через светодиод.
Цепь драйвера светодиода постоянного напряжения Хотя это может сработать, для создания схемы с хорошими характеристиками и долговременной надежностью требуется тщательный анализ и выбор номиналов компонентов.
Хотя это может сработать, для создания схемы с хорошими характеристиками и долговременной надежностью требуется тщательный анализ и выбор номиналов компонентов.На схеме справа показана типичная схема драйвера светодиода постоянного напряжения. Источник питания (не показан) обеспечивает напряжение V ps , заставляя ток течь через светодиод и последовательный «токоограничивающий» резистор, когда МОП-транзистор включен «включено», чтобы обеспечить путь с низким сопротивлением к земле. Сопротивление резистора R выбирается таким образом, чтобы сбросить разность напряжений между V ps и V f при установке I f при номинальном рабочем токе светодиода по формуле:
R = (V ps - V f ) / I f
Пример спецификации для светодиода VfИз-за неопределенности фактического значения Vf важно использовать минимально возможное значение в приведенной выше формуле.
 . Поскольку светодиод V f фактически падает при повышении температуры, такой подход гарантирует, что I f не превысит номинальное значение даже в экстремальных условиях эксплуатации. Недостаток такого консерватизма в том, что I f (и яркость) будет меньше номинального значения при более низких температурах.
. Поскольку светодиод V f фактически падает при повышении температуры, такой подход гарантирует, что I f не превысит номинальное значение даже в экстремальных условиях эксплуатации. Недостаток такого консерватизма в том, что I f (и яркость) будет меньше номинального значения при более низких температурах.Другим сопутствующим компромиссом является выбор напряжения питания V ps . Использование относительно низкого напряжения (например, 5 вольт) относительно V f сводит к минимуму рассеивание мощности на резисторе, но также увеличивает чувствительность I f (в % от номинального) к изменениям V f . И наоборот, использование более высокого напряжения, такого как 12 В, значительно снижает чувствительность к изменениям Vf, но может привести к необходимости использования мощного резистора (который будет нагреваться!). Формула для рассеиваемой мощности на токоограничивающем резисторе:
P = (V ps - V f ) / R)
Драйвер постоянного напряжения для нескольких светодиодовНапример, управление мощным светодиодом с номинальным током I f = 350 мА с использованием источника питания 12 В будет нужен токоограничивающий резистор на 5Вт! Это одна из причин, по которой использование драйверов постоянного напряжения обычно ограничивается маломощными светодиодами.
 В некоторых ситуациях можно уменьшить рассеиваемую мощность резистора, управляя несколькими светодиодами с помощью одной и той же схемы, как показано справа. Это работает до тех пор, пока сумма V f для всех светодиодов меньше, чем V ps , но имеет недостаток, заключающийся в невозможности индивидуального управления каждым светодиодом.
В некоторых ситуациях можно уменьшить рассеиваемую мощность резистора, управляя несколькими светодиодами с помощью одной и той же схемы, как показано справа. Это работает до тех пор, пока сумма V f для всех светодиодов меньше, чем V ps , но имеет недостаток, заключающийся в невозможности индивидуального управления каждым светодиодом.Как упоминалось выше, N-канальный МОП-транзистор работает как переключатель с двумя состояниями, который либо полностью выключен (очень высокое сопротивление), либо полностью включен (сопротивление менее 1 Ом), в зависимости от управляющего сигнала, подаваемого на контакт затвора. В этом типе приложений обычно используется полевой МОП-транзистор с логическим уровнем , которым можно напрямую управлять с помощью цифрового выходного сигнала микроконтроллера. Доступны многие специальные типы МОП-транзисторов, в том числе совместимые с логическими уровнями 5 В или 3,3 В.
Хотя схемы драйверов светодиодов с постоянным напряжением могут быть встроены в нестандартную конструкцию печатной платы, их также можно сконструировать с использованием небольших и недорогих модулей драйверов MOSFET, которые можно приобрести на Amazon или у поставщиков DIY.

Драйверы постоянного тока
Ввод/вывод для драйвера постоянного токаДрайвер светодиодов постоянного тока основан на схеме понижающего преобразователя, который по существу является вариантом импульсного источника питания с понижающим режимом. Это довольно просто на уровне «черного ящика», как показано на диаграмме справа. Он принимает источник питания с фиксированным напряжением (В ps ) и управляющий вход, и управляет одним или несколькими светодиодами, соединенными последовательно. Выбор компонентов в схеме драйвера устанавливает желаемый ток светодиода (I f ). Схема постоянно определяет фактический уровень тока и быстро регулирует приложенное напряжение для поддержания желаемого тока независимо от изменений светодиода V f или других факторов. Из-за используемого эффективного метода переключения сама схема драйвера обычно потребляет менее 20% потребляемой мощности светодиода и может составлять всего 2-5%. Единственное требование состоит в том, чтобы напряжение питания было как минимум на несколько вольт выше, чем сумма прямых напряжений (V f ) управляемых светодиодов.
Модуль драйвера постоянного тока для светодиодов
Драйверы постоянного тока (CC) могут использоваться с любым типом дискретных светодиодов, но они наиболее ценны для достижения оптимальной производительности с мощными светодиодами в широком диапазоне температур. Хотя драйвер CC содержит лишь небольшое количество компонентов, детали схемы выходят за рамки этой статьи. К счастью, схемы легко найти в Интернете. Более того, недорогие модули драйверов CC можно приобрести в нескольких источниках, например, в Sparkfun, показанном здесь. Этот модуль может управлять током светодиода до 1 А и доступен в 3-канальной версии для приложений RGB.
Управляющий вход драйвера CC может использоваться двумя различными способами для включения/выключения или управления яркостью светодиода. В первом режиме на управляющий вход подается аналоговое напряжение (с диапазоном в несколько вольт), определяющее ток светодиода в процентах от уставки, определяемой схемой. Для модуля, показанного выше, изменение управляющего входа в диапазоне 0,5–2,5 В приведет к тому, что светодиод I f будет изменяться в пределах 20–100 % от уставки (определяемой перемычками и значениями компонентов схемы).
 Частично из-за того, что ток (и яркость) нельзя отрегулировать до нуля, этот режим не рекомендуется для приложений, требующих смешивания цветов во всем диапазоне значений RGB.
Частично из-за того, что ток (и яркость) нельзя отрегулировать до нуля, этот режим не рекомендуется для приложений, требующих смешивания цветов во всем диапазоне значений RGB.Во втором режиме управления диммированием вход управления представляет собой цифровой сигнал, который включает или отключает схему драйвера. Когда вход высокий (> 2,4 В), драйвер подает на светодиод полный заданный ток. Когда вход выключен (< 0,4 В), драйвер отключен, и ток на светодиод отключен. Различные уровни яркости светодиодов, основанные на среднем токе светодиода, достигаются путем наложения сигнала широтно-импульсной модуляции (ШИМ) на управляющий сигнал, как описано далее в следующем разделе.
ШИМ-управление затемнением
Широтно-импульсная модуляция (ШИМ) может использоваться для управления яркостью светодиодов (т. е. диммирования) с помощью описанных выше схем драйвера постоянного напряжения и постоянного тока. Световой поток светодиода (воспринимаемый как относительная яркость) пропорционален прямому току I f .
 Из-за конечного времени отклика как светодиодов, так и человеческого глаза именно средний ток определяет воспринимаемую яркость при условии, что ток светодиода переключается между полным и полным выключением с достаточно высокой частотой. Для большинства применений в области легкой техники частота переключения (то есть частота ШИМ) от 300 Гц до 1 кГц достаточно высока, чтобы предотвратить заметное мерцание и свести к минимуму потери при переключении (т.
Из-за конечного времени отклика как светодиодов, так и человеческого глаза именно средний ток определяет воспринимаемую яркость при условии, что ток светодиода переключается между полным и полным выключением с достаточно высокой частотой. Для большинства применений в области легкой техники частота переключения (то есть частота ШИМ) от 300 Гц до 1 кГц достаточно высока, чтобы предотвратить заметное мерцание и свести к минимуму потери при переключении (т.Средний ток светодиода определяется отношением времени включения/выключения тока светодиода во время каждого цикла ШИМ. Это называется рабочим циклом ШИМ, как показано на диаграмме.
Большинство конструкций микроконтроллеров (MCU) содержат один или несколько специализированных блоков счетчиков/таймеров, которые можно использовать для генерации ШИМ-сигналов на соответствующих цифровых выходах общего назначения. С MCU, поддерживающим среду программирования Arduino, рабочий цикл этих выходов PWM можно легко изменить с помощью стандартной библиотечной функции: аналогЗапись() .
 Для большинства микроконтроллеров разрешение рабочего цикла ШИМ составляет 8 бит, что означает, что для управления яркостью светодиодов доступно 2 8 = 256 различных значений рабочего цикла ШИМ. Когда для управления отдельными цветами светодиода RGB используются три сигнала ШИМ, общее количество комбинаций яркости (т. е. количество различных возможных цветов) составляет 256 3 = 16 777 216. Миллионы цветов!
Для большинства микроконтроллеров разрешение рабочего цикла ШИМ составляет 8 бит, что означает, что для управления яркостью светодиодов доступно 2 8 = 256 различных значений рабочего цикла ШИМ. Когда для управления отдельными цветами светодиода RGB используются три сигнала ШИМ, общее количество комбинаций яркости (т. е. количество различных возможных цветов) составляет 256 3 = 16 777 216. Миллионы цветов!Существует два возможных недостатка использования «встроенных» ШИМ-выходов микроконтроллера для управления затемнением светодиодов. Первая возможная проблема заключается в том, что MCU может не иметь достаточного количества выходов PWM для поддержки приложения. Некоторые микроконтроллеры имеют только несколько выходов ШИМ, в то время как другие могут иметь до 30. Но поскольку большинство контактов ввода-вывода микроконтроллера имеют несколько функций, вы не сможете использовать все контакты с поддержкой ШИМ, если они необходимо для чего-то еще в вашем дизайне.
PCA9685 12-битный модуль драйвера ШИМ
Второй недостаток заключается в том, что 8-битное разрешение ШИМ не подходит для определенных типов динамических эффектов, особенно для выцветания цвета при низких уровнях яркости. Человеческий глаз очень чувствителен к небольшим изменениям яркости, поэтому последовательность медленного увеличения яркости светодиода от выключенного до полного может показаться прерывистой, по крайней мере, в начале эффекта. Одним из решений является использование внешнего чипа драйвера ШИМ, поддерживающего 12- или 16-битное разрешение рабочего цикла ШИМ. Примером этого типа микросхемы является PCA9.685, который обеспечивает 16 каналов ШИМ с 12-битным разрешением каждый. Шина I2C обеспечивает простой интерфейс для MCU. Микросхема PCA9685 может быть встроена в специальную печатную плату, но также доступна в виде модуля, как показано выше.
Как упоминалось ранее, сигнал ШИМ либо от микроконтроллера, либо от внешнего чипа ШИМ может использоваться для прямого управления драйвером светодиода постоянного напряжения или постоянного тока.

Драйвер аналоговой светодиодной ленты
Как описано в части 1, аналоговые (неадресуемые) светодиодные ленты RGB построены с использованием конфигурации с несколькими светодиодами и постоянным напряжением, показанной справа. Каждая группа из 3-х соседних светодиодов на полосе использует набор из 3-х токоограничивающих резисторов, по одному для каждого цвета. Катоды каждого цвета всех светодиодов на ленте соединены вместе, так что три полевых МОП-транзистора могут обеспечивать управление яркостью всей ленты (см. выше раздел о драйверах постоянного напряжения).
Типичный номинальный ток I f для светодиода 5050 составляет 20 мА. Суммарный ток, протекающий через полевой МОП-транзистор с регулировкой яркости света, составляет:
I FET = I f • (N / 3)
, где N — количество 5050 светодиодных модулей на ленте. Например, 5-метровая секция ленты 60 светодиодов/м имеет 300 светодиодов. Таким образом, ток полевого МОП-транзистора (во включенном состоянии) равен I FET = 0,02 • (300/3) = 2 А.
 Это вполне соответствует возможностям очень недорогих устройств в небольших корпусах SMT.
Это вполне соответствует возможностям очень недорогих устройств в небольших корпусах SMT.Драйвер цифровой светодиодной ленты
Светодиодные модули, используемые в цифровых (адресных) светодиодных лентах RGB, содержат некоторые схемы, описанные ранее в этой статье. В частности, они содержат драйверы постоянного тока для каждого цвета и ШИМ-контроллеры (обычно с 8-битным разрешением). Таким образом, все, что необходимо для управления этими лентами, — это источник питания (обычно 5 В или 12 В) и один сигнал данных, содержащий 24-битные данные о цвете для каждого адресуемого RGB-светодиода. Некоторые типы полос также используют тактовый сигнал, но общий эффект тот же.
Итак… очень просто, за исключением случаев, когда это не так! Есть несколько сценариев, в которых необходима дополнительная схема. Во-первых, сигналы данных (и часы), используемые большинством полос, работают с логическими уровнями 5 В CMOS, где «высокий» логический уровень требует напряжения не менее 3,5 В.
 Этот уровень не может быть достигнут выходами микроконтроллера, работающего от источника питания 3,3 В. Поскольку микроконтроллеры на 3,3 В становятся все более распространенными, возрастает потребность во включении схемы «сдвига логического уровня» между цифровым выходом микроконтроллера и входом данных (DIN) светодиодной ленты. Во время первоначального тестирования некоторые тест-полоски могут правильно работать без схемы сдвига уровня, но долговременная надежность не может быть гарантирована, особенно в широком диапазоне температур. Существует множество вариантов реализации схемы сдвига логического уровня, и снова эта схема может быть реализована с использованием дискретных компонентов или готового модуля. В этой статье переключатели уровней рассматриваются более подробно.
Этот уровень не может быть достигнут выходами микроконтроллера, работающего от источника питания 3,3 В. Поскольку микроконтроллеры на 3,3 В становятся все более распространенными, возрастает потребность во включении схемы «сдвига логического уровня» между цифровым выходом микроконтроллера и входом данных (DIN) светодиодной ленты. Во время первоначального тестирования некоторые тест-полоски могут правильно работать без схемы сдвига уровня, но долговременная надежность не может быть гарантирована, особенно в широком диапазоне температур. Существует множество вариантов реализации схемы сдвига логического уровня, и снова эта схема может быть реализована с использованием дискретных компонентов или готового модуля. В этой статье переключатели уровней рассматриваются более подробно.Второй сценарий возникает, когда «входной» конец светодиодной ленты находится на значительном расстоянии (более 10 футов или 3 метров) от контроллера. Сопротивление и паразитная емкость провода, по которому передается сигнал данных, ухудшают амплитуду и форму сигнала до такой степени, что первый светодиод на полосе не сможет правильно принимать и интерпретировать сигнал.
 Это может привести к нестабильной работе или полному отсутствию функциональности всей ленты.
Это может привести к нестабильной работе или полному отсутствию функциональности всей ленты.Существует три варианта решения этой проблемы:
- Добавьте цепь к сигналу данных (на контроллере), предназначенную для передачи сигнала по длинному кабелю с сохранением желаемой формы сигнала. Для этой цели доступны многочисленные микросхемы линейных драйверов и соответствующие схемы. В этом простейшем случае это может быть просто низкоомный резистор (33–100 Ом), включенный последовательно с сигналом данных, который гасит отражения, возвращаемые с дальнего конца кабеля (это рекомендуется даже для коротких кабелей).
- Добавьте внешний модуль повторителя сигнала, встроенный в кабель между контроллером и светодиодной лентой. Многие такие модули доступны в Интернете, и они в основном обеспечивают тот же тип схемы линейного драйвера, что описан в № 1 выше. Недорогой подход заключается в использовании отдельного светодиодного модуля (например, WS2812b или WS2815), вставленного в середину кабельной трассы, в качестве линейного повторителя/драйвера.
 Сигнал данных, полученный на входе DI, преобразуется, а затем независимо передается на выход DO. Обратите внимание, что отдельные светодиодные модули можно приобрести на своих крошечных печатных платах с контактными площадками, что делает этот подход более осуществимым.
Сигнал данных, полученный на входе DI, преобразуется, а затем независимо передается на выход DO. Обратите внимание, что отдельные светодиодные модули можно приобрести на своих крошечных печатных платах с контактными площадками, что делает этот подход более осуществимым. - Преобразуйте сигнал данных (на контроллере) в дифференциальный сигнал и добавьте печатную плату, содержащую дифференциальный приемник, на дальнем конце кабеля (рядом со входом светодиодной ленты). Есть много способов сделать это, но проще всего использовать компоненты, предназначенные для реализации дифференциального последовательного интерфейса RS-422. Такой подход позволяет использовать кабели очень большой длины. И… еще раз: доступны готовые модули RS-422 для реализации функций передатчика и приемника.
Инжекция питания светодиодной ленты
Обсуждение методов управления светодиодной лентой было бы неполным без обсуждения «инъекции мощности» — метода снижения падения напряжения, возникающего на длинных участках светодиодной ленты, вызванного высокими уровнями тока, протекающими через тонкие медные дорожки полосовой подложки.
 Чрезмерное падение напряжения может вызвать неустойчивую работу или сдвиги яркости/цвета по длине полосы. Диаграмма ниже немного перегружена, но она полезна для иллюстрации того, что происходит в системе распределения питания для светодиодной ленты.
Чрезмерное падение напряжения может вызвать неустойчивую работу или сдвиги яркости/цвета по длине полосы. Диаграмма ниже немного перегружена, но она полезна для иллюстрации того, что происходит в системе распределения питания для светодиодной ленты.Представьте себе гипотетическую адресную светодиодную ленту из 3-х модулей с напряжением питания V ps . Каждый из проводов от источника питания и заземления имеет сопротивление R w , которое в первую очередь зависит от сечения используемого провода (см. таблицу сопротивления сечения провода). Медные дорожки внутри светодиодной ленты также имеют сопротивление, а сопротивление сегментов дорожки между соседними светодиодами представлено как R s . Предполагая, что все светодиоды имеют максимальную яркость (R+G+B = белый), один и тот же ток I 9Через каждый модуль проходит 0055 м . Но поскольку все модули имеют одни и те же дорожки питания/земли, первый сегмент трасс питания/земли пропускает в три раза больше тока, чем последний сегмент.
Напряжение на плюсовой клемме каждого из модулей (V p1 , V p2 , V p3 ) уменьшено относительно V ps за счет падения напряжения I•R на сопротивлениях между модулями и блок питания. Таким образом, хотя точное вычисление может быть немного сложным, ясно, что самое низкое напряжение будет на последнем модуле на полосе (V
Очень важно понимать, что на наземных трассах происходит то же самое, только в обратном смысле. Падение напряжения I•R приводит к увеличению напряжения на клеммах заземления модулей относительно земли. Таким образом, фактическое напряжение питания, «увиденное» модулем 3, составляет В м3 = (В p3 – В g3 ).
К счастью, модули, используемые в адресных светодиодных лентах, которые содержат драйверы постоянного тока, имеют некоторый допуск в диапазоне рабочего напряжения. Например, светодиодный модуль WS2815 имеет указанный диапазон напряжения 9 В.
 .5 – 13,5В. В техническом описании не указано, сохраняется ли полная производительность при самом низком напряжении питания, поэтому, вероятно, безопаснее использовать 10–10,5 В в качестве целевого минимума при оценке падения напряжения.
.5 – 13,5В. В техническом описании не указано, сохраняется ли полная производительность при самом низком напряжении питания, поэтому, вероятно, безопаснее использовать 10–10,5 В в качестве целевого минимума при оценке падения напряжения.Основной подход к уменьшению падения напряжения заключается в минимизации сопротивления путей, по которым протекает ток между источником питания и каждым из модулей (в обоих направлениях!). Самый простой способ — использовать более толстый провод между блоком питания и полосой, уменьшая R w в обоих проводах питания. Но этого часто бывает недостаточно, когда несколько полос соединены в гирляндную цепочку.
В качестве следующего шага обеспечиваются дополнительные пути тока путем прокладки одного или нескольких дополнительных наборов проводов питания/заземления к удаленным точкам вдоль полосы и/или в конце. Хотя эти дополнительные провода также имеют сопротивление, поскольку они подключены параллельно основному сопротивлению, суммарное сопротивление между всеми модулями и источником питания уменьшается.
